%2Fhttps%3A%2F%2Ffbi.cults3d.com%2Fuploaders%2F41816228%2Fillustration-file%2F549a2cc3-fc3c-4d8d-b4d2-8bf981b6df78%2Ffoto-4.png)
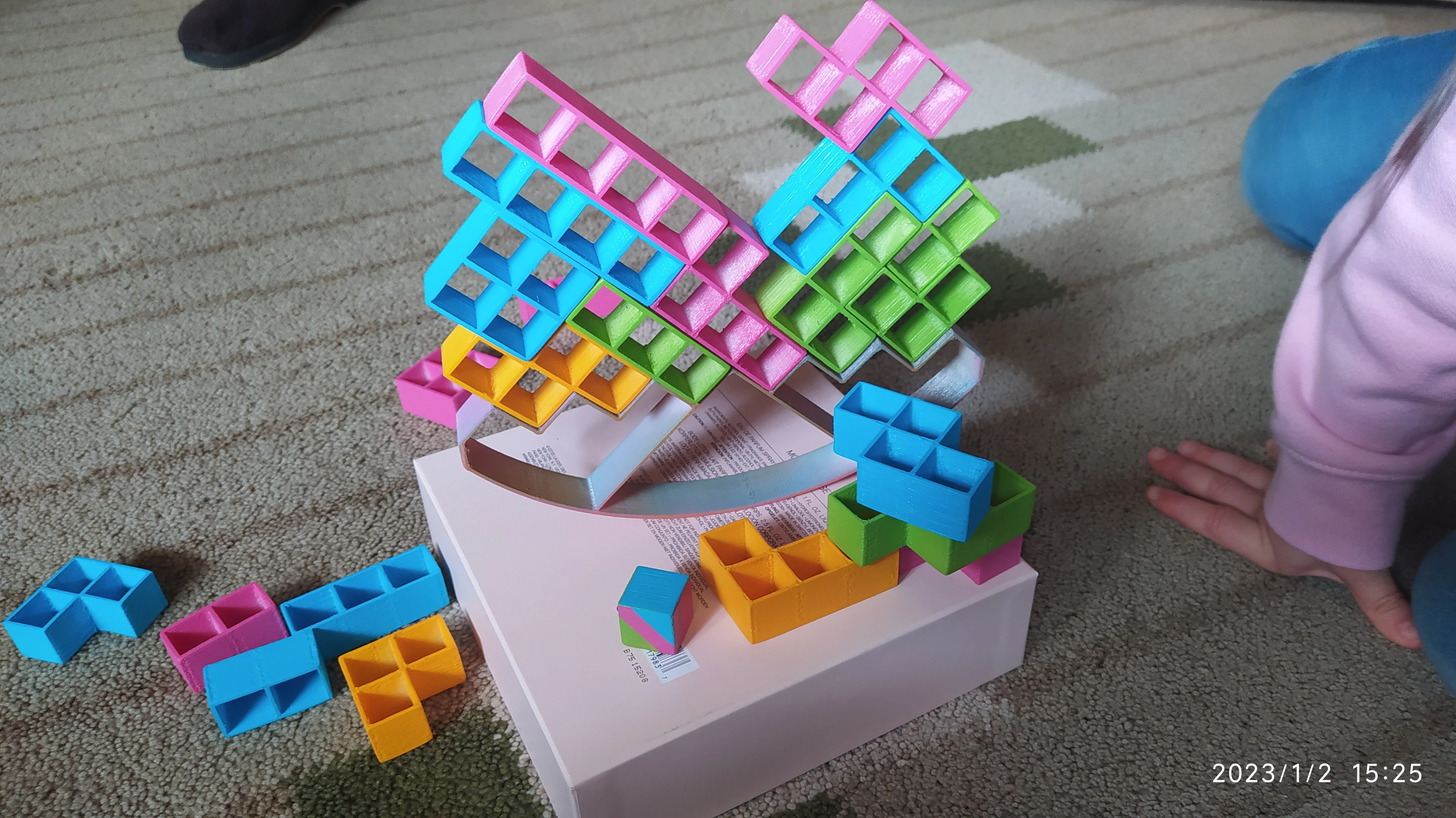
Balancín DobleIngenieros
by ingenieriaprint3D
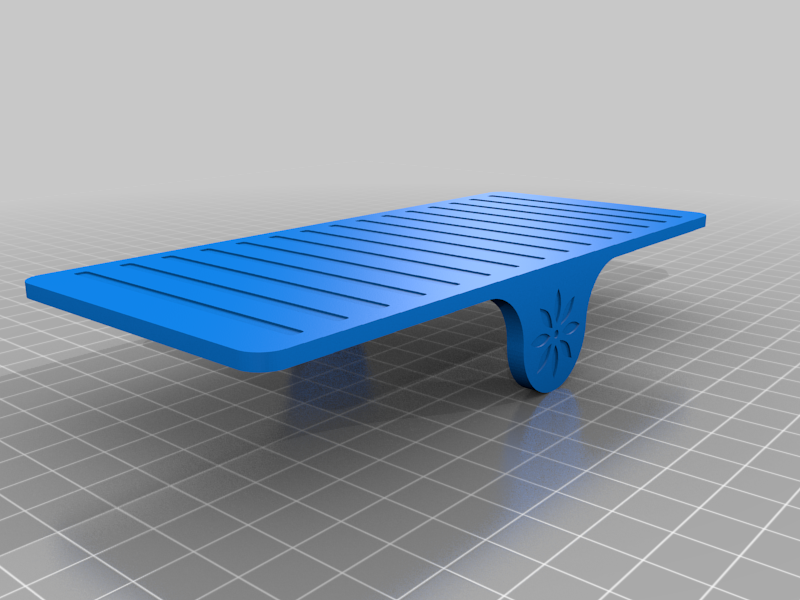
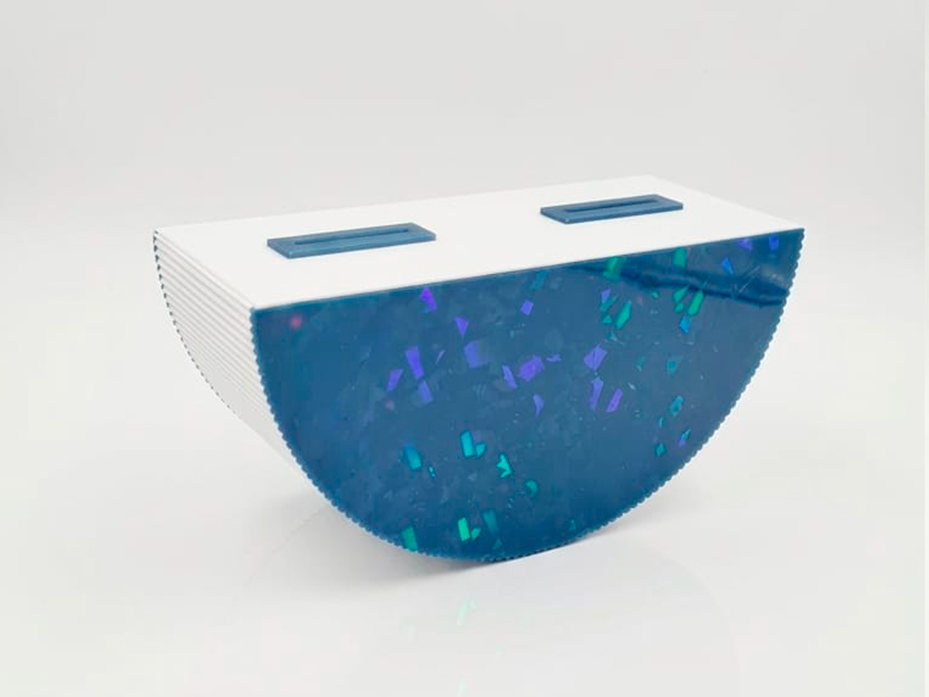
This project is a motorized seesaw controlled by a PID algorithm, designed to remain balanced in the horizontal position (angle 0°) thanks to the action of two propellers mounted at its ends. This is an ideal tool for teaching and practicing control systems, with application in areas such as robotics, mechatronics and automation. In addition, a .zip file is provided with the explanation of the entire assembly including the electronic part of the project. The system is composed of three main 3D printed parts: 🔩 Base: Provides the structural support and houses the ESP32, which acts as the brain of the system. From here, data is received from the MPU6050 sensor (located on the platform) and the motors are controlled through the ESCs. ⚙️ Shaft: Connects the base to the platform and allows the rocker arm to rotate. It is designed to facilitate smooth, stable and reproducible motion, which will be measured by the IMU. 🪐 Platform: This is the moving part of the system. On it are mounted: Two brushless motors, one at each end. Their respective ESCs, which receive the PWM signals from the ESP32. An MPU6050 module, which measures the tilt angle of the platform in real time and sends the data to the ESP32. 🔌 Electronics used: ESP32 (on the base): Microcontroller that runs the PID algorithm, receives the data from the MPU6050 sensor (via I2C) and controls the speed of the motors through PWM signals sent to the ESCs. MPU6050 (on the platform): Inertial sensor (accelerometer + gyroscope) that measures the tilt of the platform with high precision. 2 Brushless motors + 2 ESCs: Generate the thrust needed to dynamically stabilize the see-saw. Voltage divider: Optional, used to adapt signals if additional sensors are integrated or to protect microcontroller inputs. Potentiometer to control the see-saw angle. 🎯 Objectives and applications: To show clearly and visually how a PID control system works in a real physical environment. To practice the use of inertial sensors (IMU) and br